Title.
This project was a year long commitment . Before I could begin to start a project like this I had to first learn how circuit wiring and programming language works. I started with the basics; resistors, capacitors then moving onto more complex circuits like transistor, infrared and LDR. I practiced our skills on bread board to work out what system would work best for my robot. I went with a ultersonic sensor it is one of the most reliable system and was been proven to wire easily.
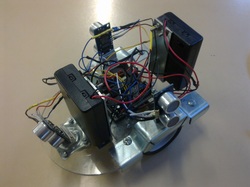
Among other things, the gearbox assemble prove to be critical, the ratios used to produce drive was 2nd last raito used in amarp robot. If the ratio was too high and the sensing to slow there could be a chance that the robot would hit the maze walls, alternatively, if you reduced the ratio, the robot may get through the maze successfully, but perhaps too slow.
Among other things, the gearbox assemble prove to be critical, the ratios used to produce drive was 2nd last raito used in amarp robot. If the ratio was too high and the sensing to slow there could be a chance that the robot would hit the maze walls, alternatively, if you reduced the ratio, the robot may get through the maze successfully, but perhaps too slow.
